
Smart Modules for AI-supported Serial X-Ray Micro Computed Tomography for Comparative Morphological Studies at PETRA III/IV
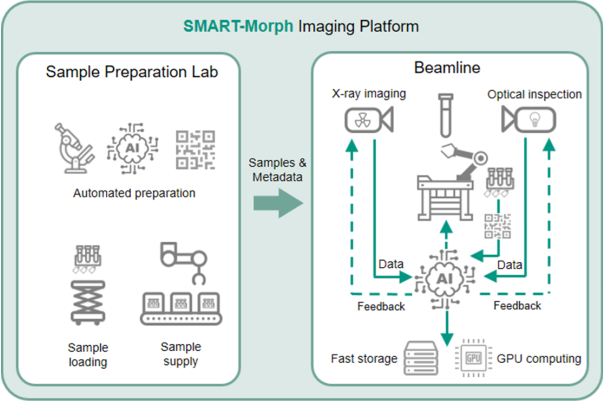
| SMART-Morph shall for the first time enable large-scale comparative morphological studies of small organisms at synchrotron sources. Accordingly, morphological imaging at PETRA III/IV will be substantially improved to (a) obtain 3D structure information much more efficiently than before and on a large scale using thousands of individual samples, and (b) compare morphological results within and between large series so that they can later be correlated with molecular and ecological data. To this end, SMART-Morph focuses on modules for robotic workflows and AI-assisted control of μCT series acquisition and analysis. The methodology, which we call serial micro-computed tomography (SμCT) in reference to serial protein crystallography, will enable highly efficient use of coherent synchrotron radiation for intelligent and systematic high-throughput digitization with optimal comparability. SMART-Morph will develop fundamental building blocks for automated smart sample preparation, data acquisition protocols, and experimental modalities along with corresponding quality management to establish SμCT as a robust technique at PETRA III/IV. Key approaches concern automated sample management, intelligent control of large-scale experiments and overall data management (DAQ, 2D and 3D reconstruction post-processing, metadata handling). The modules will first be installed at P23 and exemplarily demonstrated on species-rich insect collections from current biodiversity projects and on series of model organisms. In perspective, the methodology will be made available to users at P23, P05, and P14 and will enable large-scale comparative 3D morphological and morphometric synchrotron studies, which are of fundamental importance for broad areas of the life sciences. |
|
Overall goals
Important examples of main challenges in this context are gaining fundamental understanding of
- genetic functions by correlating morphology and molecular data, particularly correlation between phenotype and genotype,
- environmental factors, reactions to external stressors and stimuli, particularly (a) biotic environmental factors such as predators and parasites; (b) abiotic natural factors; including (c) drugs and toxins,
- functional morphology: (a) functionality of locomotor systems, e.g. complex joints for biomimetic applications; (b) morphodynamics of cells and tissues, like fate decisions of cells due to mechanical forces occurring during development/embryogenesis.
Partners
- Lars Krogmann (Project Leader, University of Hohenheim)
- Tilo Baumbach, Evelina Ametova, Alexey Ershov (KIT-LAS)
- Jürgen Becker (KIT-ITIV)
- Venera Weinhardt, Joachim Wittbrodt, Tinatini Tavhelidse-Suck (Heidelberg University)
Associated Partners
- Thomas van de Kamp, Tomáš Faragó, Elias Hamann, Carlos Sato Baraldi Dias (KIT-IPS)
- Suren Chilingaryan, Andreas Kopmann (KIT-IPE)
- Julian Moosmann (HEREON)
- Thomas R. Schneider, Elizabeth Duke (EMBL, Hamburg)
- Dmitri Novikov (DESY)
